最新情報
ナウいマイコン PSoC4200 と m5stack の Delay関数の注意点(バラつき)
m5stack を使用して
delayMicroseconds()
関数を使用していたのですが、delay時間が安定しないので調べてみました。
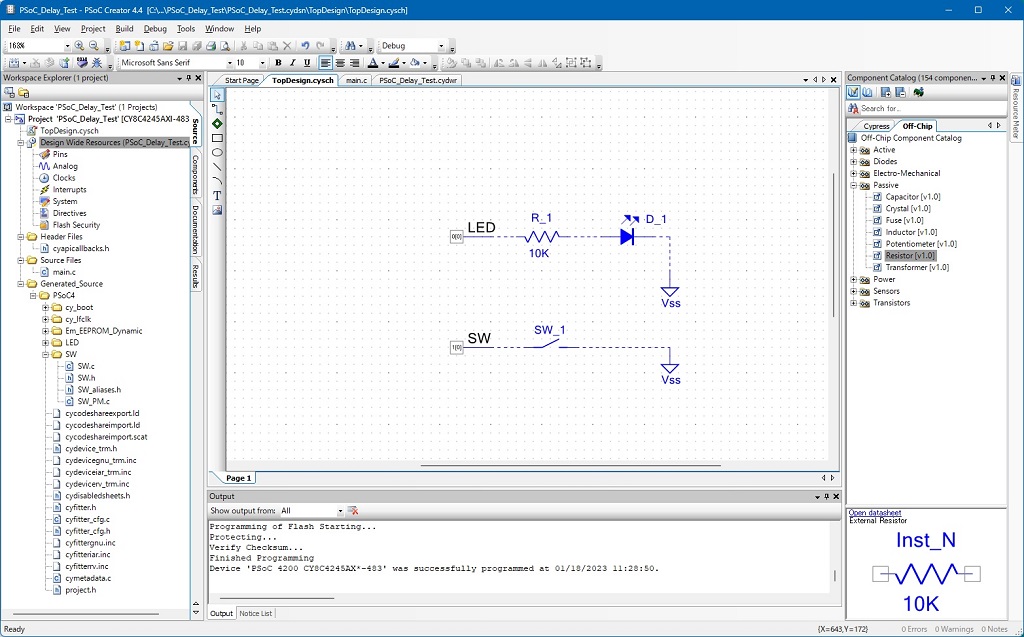
スイッチを押したら2マイクロ秒だけLED点灯というソフトを使用し
LED点灯時間を32回測定してみました。
#include <Arduino.h>
#include <M5Stack.h>
#define pin_sw 2 //
#define pin_led 5 //
unsigned int led_on_time = 2; // LED ON 時間 (uS)
void setup() {
// put your setup code here, to run once:
M5.begin(true, false, true, true);
M5.Lcd.setTextSize(3);
M5.Lcd.setCursor(20, 0);
M5.Lcd.println("Delay TEST");
pinMode(pin_sw, INPUT_PULLUP); // プルアップ入力に設定
pinMode(pin_led, OUTPUT); // 出力に設定
digitalWrite(pin_led,1);
delay(250);
digitalWrite(pin_led,0);
}
void loop() {
// put your main code here, to run repeatedly:
if (digitalRead(pin_sw) == 0){
digitalWrite(pin_led,1);
delayMicroseconds(led_on_time); // LED ON
digitalWrite(pin_led,0);
delay(10);
while(digitalRead(pin_sw) == 0) // SW 離されるまで
delay(10);
}
}なるべく同じ条件で PSoC4 でもテストしてみます。
#include "project.h"
uint16 led_on_time = 2; // LED ON 時間 (uS)
int main(void)
{
CyGlobalIntEnable; /* Enable global interrupts. */
/* Place your initialization/startup code here (e.g. MyInst_Start()) */
LED_Write(1);
CyDelay(250);
LED_Write(0);
for(;;)
{
/* Place your application code here. */
if (SW_Read() == 0){
LED_Write(1);
CyDelayUs(led_on_time); // LED ON
LED_Write(0);
CyDelay(10);
while(SW_Read() == 0) // SW 離されるまで
CyDelay(10);
}
}
}
結果:
m5stack 計測例
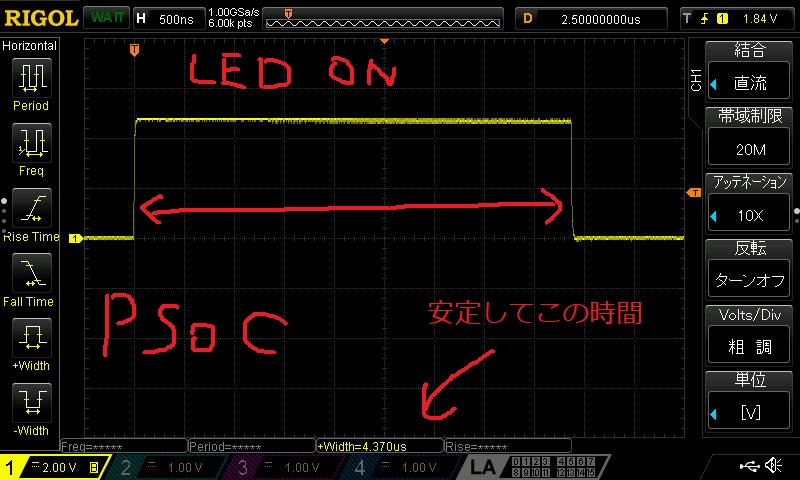
PSoC4200 計測例
計測中の様子
ナウいマイコン PSoC4200 と m5stack の Delay関数の注意点(バラつき) – YouTube
測定結果を表にまとめてみました
| 単位uS | ||
| PSoC4 | M5Stack | |
| 1 | 4.370 | 2.065 |
| 2 | 4.370 | 2.000 |
| 3 | 4.370 | 3.100 |
| 4 | 4.370 | 2.550 |
| 5 | 4.370 | 2.555 |
| 6 | 4.370 | 2.550 |
| 7 | 4.370 | 3.100 |
| 8 | 4.370 | 2.550 |
| 9 | 4.370 | 2.550 |
| 10 | 4.370 | 2.550 |
| 11 | 4.370 | 2.550 |
| 12 | 4.370 | 2.615 |
| 13 | 4.370 | 2.550 |
| 14 | 4.370 | 3.165 |
| 15 | 4.370 | 3.105 |
| 16 | 4.370 | 3.100 |
| 17 | 4.370 | 2.550 |
| 18 | 4.370 | 3.105 |
| 19 | 4.370 | 3.100 |
| 20 | 4.370 | 3.100 |
| 21 | 4.370 | 2.555 |
| 22 | 4.370 | 3.100 |
| 23 | 4.370 | 2.065 |
| 24 | 4.370 | 3.100 |
| 25 | 4.370 | 2.550 |
| 26 | 4.370 | 2.615 |
| 27 | 4.370 | 2.550 |
| 28 | 4.370 | 2.620 |
| 29 | 4.370 | 2.550 |
| 30 | 4.370 | 2.555 |
| 31 | 4.370 | 3.100 |
| 32 | 4.370 | 3.100 |

PSoC4200 は
4.370uS
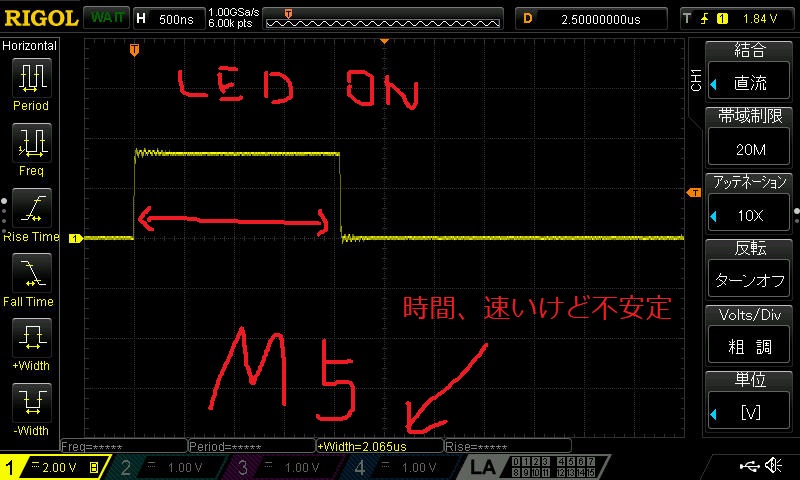
m5stack は
最小 2.000uS めっちゃ速い!関数に飛んだり、レジスタ格納したりいつやってんだ?????
最大 3.165uS
という結果です。
m5stack はとても速いですが、安定という意味ではイマイチ
PSoC4200はちょっと遅いけど、超安定という結果です。
m5stack は CPUがマルチコアで、Arduino環境をOS(FreeRTOS)が作り出し管理しているらしい・・・・・・・・・(たぶん)。
Bluetooth、WiFiなど、てんこ盛り状態の超高性能マイコンですが、奥の奥まで使いこなすのは(私では)大変そうです。
Bluetooth、WiFiモジュールとして割りきって使っていこうと思います。
加納 大裕 (かのう だいゆう)

-
- 2026.01.13
- 薪ストーブ出店 新城消防祭
-
- 2025.12.23
- 薪ストーブ出店 しんしろ軽トラのんほいルトット
-
- 2025.12.22
- なぜ加納製作所の「熱放射塗料」塗料はやわらかくやさしい暖かさで家中を温めるのか?
-
- 2025.11.21
- 薪ストーブ、新城軽トラ市に出店します。
-
- 2025.11.12
- 薪ストーブ出店 したら森フェス2025
加納製作所の商品開発





まずは新たな発想を生む
私達の開発環境へお越しください。
知識・経験・ノウハウがそのお悩みを解決します。
